Table of contents
- Preface
- Motivation
- High resolution time management in Linux
- Mach Kernel
- Mach Clock API
- Deprecated Mach Clock API
- Links
Preface
This is a story of a little fight with an obscure OS X clock API.
When it comes to high-resolution time management in OS X wouldn’t it be a dreamy to have the following routines:
- Receive current monotonically incrementing time value.
- Sleep for a specified interval.
- Sleep until a specified time.
Motivation
This fight was begun when I tried to make time-related operations portable in Roc.
Thanks
I would like to thank my friends and colleagues:
- Victor Gaydov and his project, that was a reason why this article has appeared and for dozen helpful advices how to improve this article.
Linux
Linux provides the following routines for high resolution clock management:
You probably shouldn’t be afraid if clock_nanosleep isn’t implemented on
your system, you can use gettimeofday
and nanosleep, but you’ll lose a precision and the monotony because of
gettimeofday. You should test it first and maybe it will be acceptable in
your case.
As you remember this article isn’t about Linux and to figure out how OS X clock API actually works, we need to dig into OS X architecture a little.
Mach Kernel
XNU (X is not UNIX) is OS X kernel. It is constructed from two distinct parts: BSD interface used to build POSIX API; Mach interface to handle processes, threads, virtual memory, and scheduling. XNU is a hybrid kernel.
Mach kernel was heavily reworked in release 3 (1993) and became a pure kernel,
moving the BSD part into the user space. Excluding UNIX-specific code from the
kernel allows to easily replace BSD with another operating system or even
running several Linux operating system interfaces simultaneously on the top
of the Mach kernel.
Mach design is all about IPC (inter-process communication mechanism), it is called Mach Ports. Whenever you want to use some kernel or user space facilities, you need to send a message to some port. Mach ensures security by requiring that message senders and receivers have rights. A right consists of a port name and a capability to send or receive on that port, and is much like a capability in object-oriented systems. Only one task may receive messages on a corresponding port, but many tasks may send messages to this port. Mach port is very similar to a Linux file descriptor.
Mach Clock API
There are 3 ways to work with time in OSX:
- API based on
mach_timespec_t - API based on
AbsoluteTime clock_gettime, that was introduced in OS X Siera, but there aren’t any news aboutclock_nanosleepintroduction. It won’t be dicsussed in this article.
API based on mach_timespec_t
By exploring man pages in XNU repository, we can figure out, that Mach API has something called clock_service.
Let’s explore what we can do with it:
#include <mach/mach.h> /* host_get_clock_service */
#include <mach/clock.h> /* clock_get_time */
#include <mach/mach_error.h> /* error handling */
kern_return_t err = KERN_SUCCESS;
clock_serv_t host_clock;
// mach/clock_types.h
//
// kern_return_t
// host_get_clock_service(
// host_t host,
// clock_id_t clock_id,
// clock_t *clock)
//
// Reserved clock id values for default clocks.
//
// #define SYSTEM_CLOCK 0
// #define CALENDAR_CLOCK 1
// #define REALTIME_CLOCK 0
//
// Where `clock_id` is the identification of the desired kernel clock with
// possible values:
//
// - REALTIME_CLOCK stands for a time since a boot time. It has the same
// semantic as CLOCK_MONOTONIC.
//
// - BATTERY_CLOCK - (typically) low resolution clock that survives
// power failures or service outages.
//
// - HIGHRES_CLOCK - a high resolution clock.
//
// This function returns a send right to a kernel clock's service port.
err = host_get_clock_service(mach_host_self(), SYSTEM_CLOCK, &host_clock);
if (err != KERN_SUCCESS) {
mach_error("host_get_clock_service: ", err);
exit(EXIT_FAILURE);
}
// struct mach_timespec {
// unsigned int tv_sec; /* seconds */
// clock_res_t tv_nsec; /* nanoseconds */
// };
// typedef struct mach_timespec mach_timespec_t;
//
// As you can see, mach_timespec_t is the same as timespec in Linux.
mach_timespec_t now;
err = clock_get_time(host_clock, &now);
if (err != KERN_SUCCESS) {
mach_error("clock_get_time: ", err);
exit(EXIT_FAILURE);
}
// We should deallocate the port returned by host_get_clock_service,
// because we no longer need it.
//
// You should be careful with mach ports allocation and deallocation,
// because it is usually can cause the ports leak problem.
err = mach_port_deallocate(mach_task_self(), host_clock);
if (err != KERN_SUCCESS) {
mach_error("mach_port_deallocate: ", err);
exit(EXIT_FAILURE);
}
Mach API also provides a system call similar to clock_nanosleep. It is called
clock_sleep.
For more details about Mach API I recommend to use the following resources:
- OSF Mach Kernel Principles
- OSF Mach Kernel Interfaces
- XNU man pages
- XNU man pages from MIT
It’s worth to mention, that API based on mach_timespec_t is
deprecated. The
possible reasons are discussed in Deprecated Mach clock API
section.
API based on AbsoluteTime
Apple explains hight resolution clock management in the following articles:
We are recommended to use mach_absolute_time function.
mach_absolute_time returns a Mach Time unit - clock ticks. The length of a
tick is a CPU dependent. On most Intel CPUs it probably will be 1 nanoseconds
per tick, but we shouldn’t rely on this fact. The kernel provides a
transformation factor that can be used to convert abstract Mach time units to
nanoseconds.
Example of receiving current time in nanoseconds using mach_absolute_time:
#include <mach/mach_time.h> /* mach_absolute_time */
mach_timebase_info_data_t info;
kern_return_t ret = mach_timebase_info(&info);
if (ret != KERN_SUCCESS) {
// Some kind of disaster...
}
// You should cache this value to avoid calculating it each time.
double steady_factor = (double) info.numer / info.denom;
uint64_t now_ns = mach_absolute_time() * steady_factor;
Mach APIs under the hood
Let’s try to receive current time using both APIs:
mach_timespec_t: 556680752418861 nsmach_absolute_time: 55668752378055 ns
Both values belongs to the same time domain.
-
API based on
mach_absolute_timeuses RDTSC underneath. You can review source for more details. -
API based on
mach_timespec_tuses RDTSC through Mach ports.
Deprecated Mach Clock API
There are problems with time API based on mach_timespec_t. To receive the
current time you need 3 system calls:
- host_get_clock_service
- clock_get_time
- mach_port_deallocate
host_get_clock_service and mach_port_deallocate usually will be called only
once. We need to value the cost of clock_get_time.
Using Benchmarks for time-related operations for OS X and Linux we can see the difference.
mach_absolute_time:
| function name | number of calls | avg (ns/call) |
|---|---|---|
| mach_absolute_time | 1000 | 35 |
| mach_absolute_time | 1000000 | 36 |
| mach_absolute_time | 5000000 | 37 |
clock_get_time:
| function name | number of calls | avg (ns/call) |
|---|---|---|
| clock_get_time | 1000 | 839 |
| clock_get_time | 1000000 | 832 |
| clock_get_time | 5000000 | 813 |
The cost of system call is important, but it’s not a key problem here.
First, let’s look at the diagram below to figure out what is performed underneath. As you remember XNU is all about IPC.
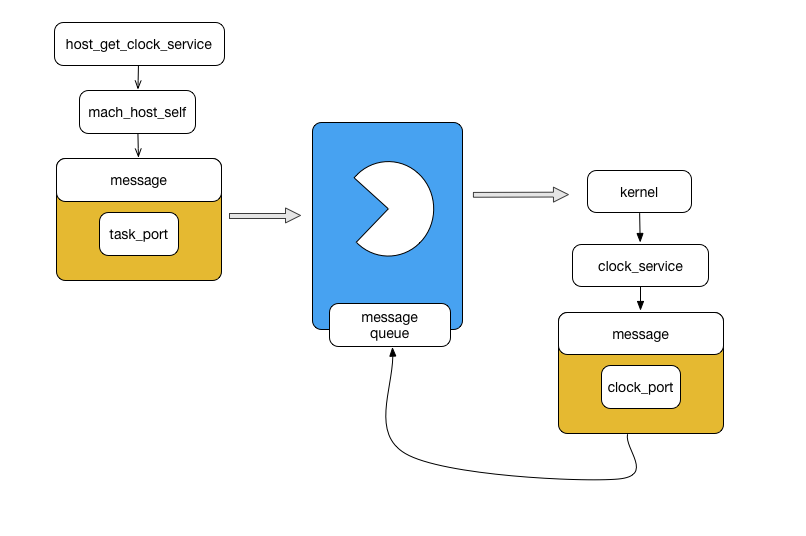
To deal with a clock service you need:
- Put a port (task_port), where to send the result, in a message.
- Send the message to the specified port (clock_service).
- The message will be put in the port queue.
- Receive clock_port.
Kernel allocates a clock_port for us, using which we’ll obtain a required current time.
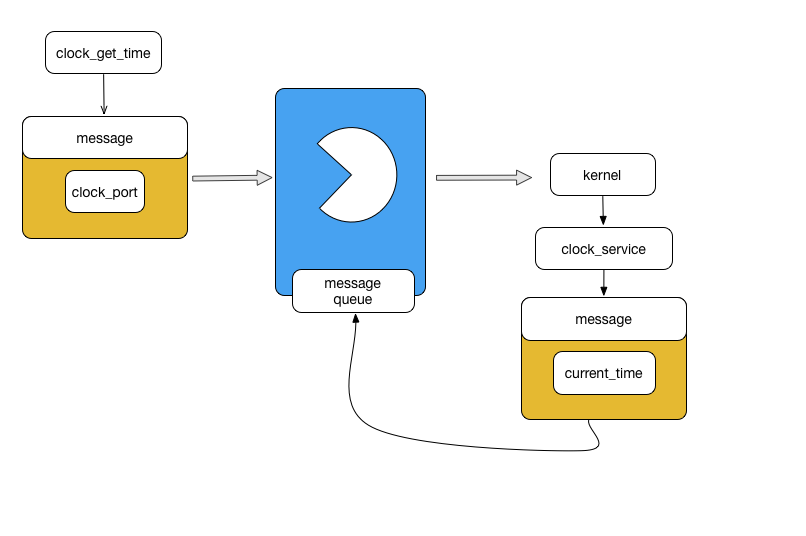
- Put a port (clock_port), where to send the result, in a message.
- Send the message to the specified port (clock_service).
- The message will be put in the port queue.
- Receive current time.
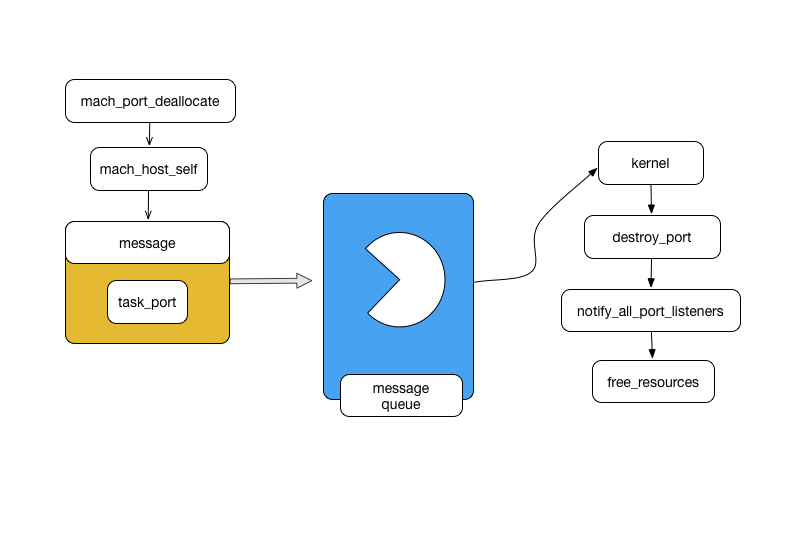
When we don’t need this port we should deallocate it to avoid a port leak problem.
It seems, that we don’t have any problems here, but the devil in the details. A port is a protected bounded queue. If your system is under a high load, the queue can be full and we’ll need to wait until our message will proceed. We can meet this problem in each previously mentioned functions. As a result of our “high precision time management” will lose a precision.